Variable stiffness connecting body
Able to change its own shape and maintain high rigidity with small force
Overview
The mechanism that switches between a flexible state, which can
be easily deformed when applying external force, and a high stiff
state, which can transmit force to the outside when contact is made,
has been studied in the past. A gripper that grasps an object using
this mechanism has also been proposed. There are a wide variety
of grippers, some consisting of a plurality of connecting parts
arranged in a row connected to each other with a rotation flexibility,
and others consisting of beads arranged in a row through a wire.
However, increasing its length results to the loss of friction force, so
it is not possible to achieve a high stiff state and to change the
shape by itself.
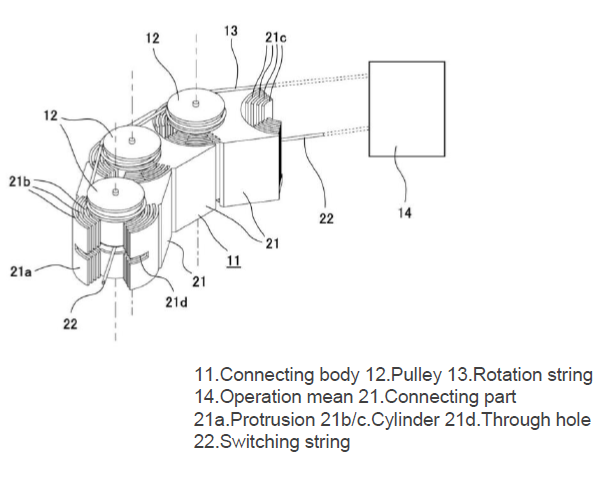
This invention overcomes these issues, and provides a variable
stiffness connecting body that can change its own shape and
maintain a high stiff state with a relatively small force. This invention
has pulleys on multiple connecting parts that are connected in a row.
Each pulley has a string for rotation and is configured to allow
switching between fixed and rotational states of the connecting
parts. This invention can reduce the force required to keep the
connecting body in a fixed and high stiff state, thus allowing to keep
grasping the object with a relatively small force.
Configuration of the variable stiffness connecting body
Product Application
・Gripper (robot hand)
・Machine tool
・Tube inspection device
IP Data
IP No. : JP2021-186889
Inventor : TADAKUMA Kenjiro, et al.
keyword : robot