Deformable mechanism and gripper
Possible to increase stiffness while keeping its thinness
Overview
So far, a thin deformable mechanism that can be operated at hand has been developed to deform a thin plate into a curved shape. The stiffness of an object depends on the second moment of area and the Young's modulus of the material. So in a curving deformable mechanism, the second moment of area depends on the cross-sectional shape of the initial state. In other words, even if a metal plate with a high Young's modulus is used, the stiffness is low against bending. In addition, increasing the plate thickness in the bending direction increases the amount of plate elongation during bending, resulting in a smaller bendable range.
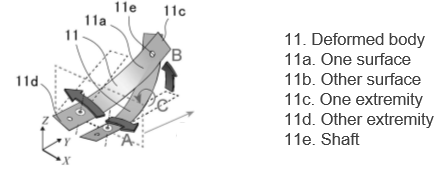
This invention is able to provide a deformable mechanism and gripper that can increase stiffness while keeping its thinness. This invention has an elongated plate shape, an elastic property to flex in the thickness direction and to twist around an axis along the length direction, and a pair of deformable bodies rotatably connected to an operating support. Each deformable body is characterized by the surfaces being configured to tilt in inward direction toward each other. This provides a deformable mechanism and gripper that can increase rigidity while remaining thin.
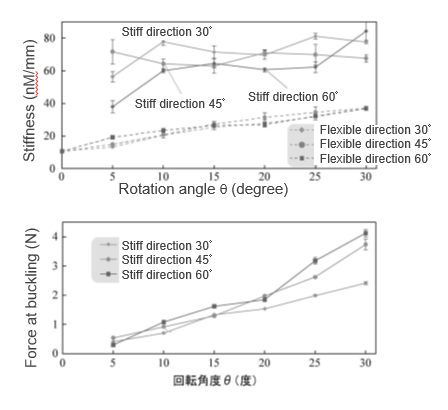
Stiffness in flexible and stiff directions, and force at buckling is increased with rotation angle
Product Application
・Gripper, object scooping device
・Structure for bending motion of entry device for narrow environment, such as piping inspection robot
・Blade which can be bended
IP Data
IP No. : JP2022-175781
Inventor : TAKAHASHI Tomoya,WATANABE Masahiro,TADAKUMA,Kenjiro,TAKANE Eri,KONYO Masashi,TADOKORO Satoshi
keyword : Hand, Gripper