2 directional driving device
Backlash reduction and output accuracy improvement
Overview
Conventionally, drive mechanism such as conical gear has been developed for robot arm joint to enable driving in multiple directions with a single joint. The joint of the robot arm can be made smaller and more sophisticated by using such driving device. However, since the gear is used to convert the rotation direction, backlash is generated and causes output error. Moreover, the smaller the size, the more difficult it becomes to transmit a large amount of torque.
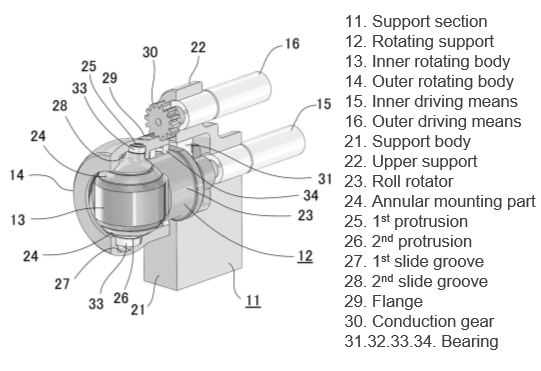
This invention is able to reduce backlash and increase output precision, and to provide a 2 directional driving device that can transmit a relatively large amount of torque even when downsized. This invention is composed of a support, a rotating support, and a plurality of protruding parts, wherein the extremity of each protruding part is configured to rotate the inner rotating body by the sliding movement. This structure reduces backlash, improves output precision, and provides a 2 directional driving device that can transmit a relatively large amount of torque even when downsized.
Sliding movement of the protruding part extremity improves output accuracy
Product Application
・Robot
・Robot arm
IP Data
IP No. : JP2023-037679
Inventor : ABE Kazuki, TADAKUMA Kenjiro
keyword : Wheel, crawler, caster