Stiffness variable coupling body
Pressurized rigid flexible switching mechanism capable of increasing rigidity in arbitrary shape
Overview
The development of flexible rigid switching mechanism which can change the rigidity in arbitrary shape is advanced. Especially, the mechanism which increases the rigidity by pressurization has the merit that the driving force is not limited. On the other hand, the conventional mechanism has the problem that it is difficult to increase the rigidity in the bent state, and the mechanism is complicated to realize the rigidity.
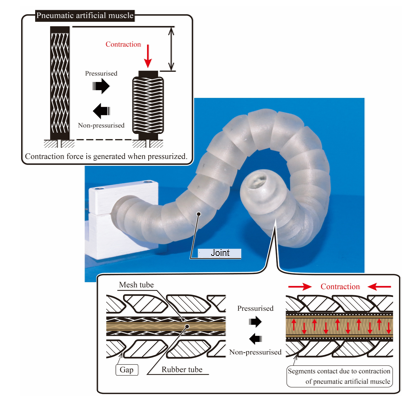
The present invention is a pressurized mechanism having a plurality of connecting members and rubber artificial muscles inside. When rubber artificial muscles are pressurized, they expand in the vertical (diameter) direction and contract in the extension direction, so that the connecting members adhere to each other and become highly rigid. On the other hand, when the rubber artificial muscles are not pressurized, a gap is formed in the connecting members, resulting in a low rigidity state. In a high rigidity state, the connecting members adhere to each other, preventing separation of the members and loss of holding force.
Features・Outstandings
Product Application
・Robot Gripper and Arm
・Inspection device in pipe
・Video scope
IP Data
IP No. : JP2023-166278
Inventor : ONDA Issei, TADAKUMA Kenjiro, WATANABE Masahiro, ABE Kazuki, KONYO Masashi, TADOKORO Satoshi
keyword : robot hand, robot gripper