Gripper capable of grasping unknown shapes
Gripping mechanism that fits and deforms the shape of the object
Overview
Robots that explore extreme environments such as planets, caves, and volcanoes are being developed. In such environments, it is difficult to survey topography in advance, so robots that can move on unknown surfaces are required. In addition, due to the recent labor shortage, there is a great demand for mechanizing operations in factories and warehouses. In order to mechanize operations performed by human hands, robot hands capable of grasping various objects by one mechanism are required. As described above, if a gripper capable of grasping unknown shapes can be realized, there will be a great demand.
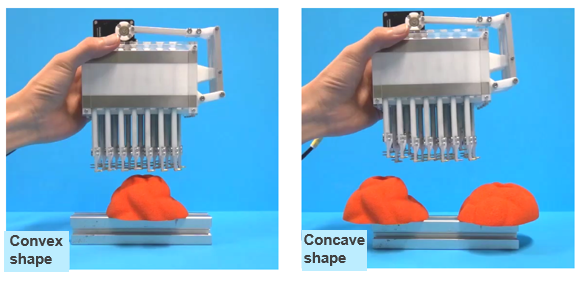
The present invention relates to a gripper that can grasp unknown shapes by fitting and deforming with the shape of the object. The ordinary grippers usually cannot grasp the concave shapes, but the present mechanism can grasp by fitting them. In addition, it is advantageous that both convex and concave shapes can be grasped by the same operation using only one actuator.
In the Related Works No.2, it is possible to view a video (Japanese).
Features・Outstandings
Product Application
・Robots that explore planets, caves, and volcanoes
・Industrial machinery in factories and warehouses
・Civil construction machine
・Agricultural machine
・Measuring machine and measuring service of unknown shape
・Various other applications that require grasping or exploration of unknown shapes
Related Works
1,T. Kato, K. Uno, K. Yoshida, Proc. IEEE ROBIO, pp. 1365–1370, 2022, DOI: 10.1109/ROBIO55434.2022.10011858.
2,New Technology Presentation Meetings 2023
3,Research Profiles of Tohoku University
IP Data
IP No. : WO2023/233468
Inventor : KATO Takuya, UNO Kentaro
keyword : robot、 gripping mechanism