Variable stiffness cords
More rigid, more durable, thinner, and lighter than conventional mechanism To robots, endoscopes, videoscopes
Overview
Current development efforts focus on a cord-like device, able to vary its rigidity to any given shape. These cord-like structures are specifically designed to operate effectively in biological, natural, and artificial environments where access can be challenging due to their narrow or obstacle-filled nature. They are frequently used in tools such as medical endoscopes and industrial videoscopes.
Conventional cord-like bodies include structures in which wires are threaded through beads, jamming mechanisms, mechanical methods, or structures that control rigidity by pressurizing a tube. However, none of these methods could fulfill all the required performance characteristics such as holding force, restoring force, a continuous structure, lightweight and thin design, and capability for long-distance deployment.
This invention addresses all these requirements by introducing a novel type of cord-like continuum body. Specifically, it employs an innovative combination of wire and rubber materials, thereby creating a structure capable of achieving a high level of holding strength through air pressure.

Features・ Performance
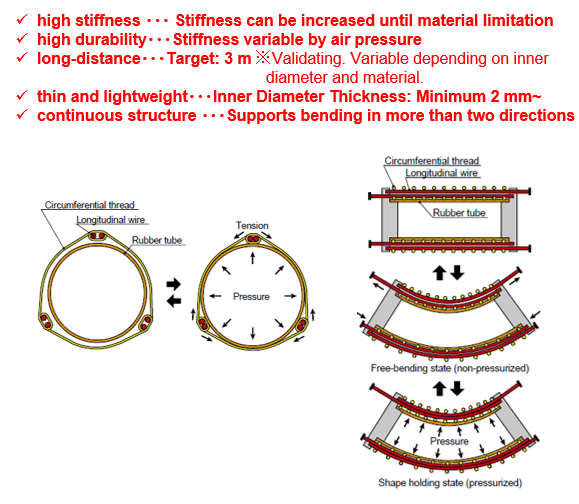
Product Application
・Robotic arm
・Medical endoscope
・Industrial videoscope
IP Data
IP No. : JP2023-095994
Inventor : WATANABE Masahiro, ONDA Issei, SANO Shunsuke, TADAKUMA Kenjiro, TADOKORO Satoshi
keyword : Roboticarm, Medicalendoscope, Industrialvideoscope