東北大学技術
整理番号:T24-029
積層法による一括製造方法
3Dプリンタ・ロボットによる複雑部品の一括製造
概要
製造業において、顧客ニーズの多様化に伴い多品種少量生産や、複雑な製造技術の要求が増加傾向にある。中でも多品種、ごく少量生産である内視鏡は、その作製において、部品加工や組み立て作業は一般的に熟練者による手作業によって行われている。しかし、手作業では個人差によるばらつきや、作製に時間がかかるといった課題があった。
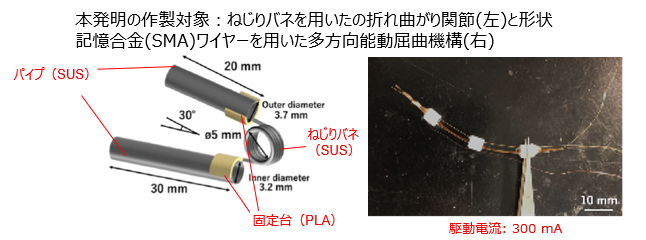
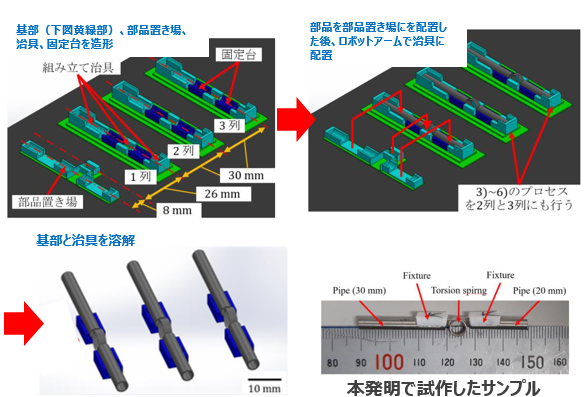
前記課題を解決すべく、本発明は3Dプリンタとロボットアームを用いて複雑な部品製造・組み立て工程を自動で一括作成する手法を開発した。具体的には、固定台及び治具を溶解性材料で積層造形し、ロボットアームを用いて部品を本体部材に配置した後、固定台及び治具を溶解する(下図参照)。 耳科領域で用いる箸状内視鏡の関節部(下左図)と、形状記憶合金(SMA)ワイヤーを用いた多方向能動屈曲機構(下右図)に適用し、試作と動作確認を行うことができた。
今後、各種微小電子部品の実装も行うことで、様々な低侵襲医療機器および一部の民生品に対し本技術を適用し広い用途への展開を目指す。
製造工程概要
応用例
・多品種少量生産の自動化
・複雑な部品加工、組み立て作業の自動化
関連文献
[1] 第63回日本生体医工学会予稿(2024)
知的財産データ
知財関連番号 : 特願2024-077455
発明者 : 芳賀 洋一、鶴岡 典子、許 峻、阿部 慎平
技術キーワード: 積層造形、ロボットアーム