End effector that can move on rough or flat ground
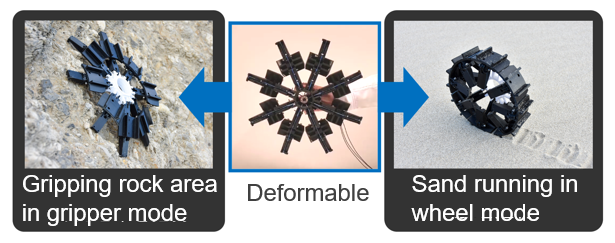
Deformation mechanism having two modes of gripper and wheel
Overview
Robots that search for planets and collect damage information on disaster-stricken areas need to be able to cope with both rough terrain, such as steep slopes and uneven surfaces, and flat terrain. However, it is difficult to improve the mobility efficiency of both rough and flat terrain. For example, a robot that can climb by grasping steep slopes has poor mobility efficiency on flat terrain, and a robot that can move by wheels on flat terrain is not suitable for moving steep slopes and uneven surfaces.
The present invention relates to an end effector that acts as a gripper when traveling on rough terrain and a wheel when traveling on flat terrain. By applying the end effector to a robot, a robot with high moving efficiency can be realized on both rough and flat terrain.
Features・Outstandings
Product Application
・A robot that probes planets
・Robots that explore extreme environments such as caves and volcanoes
・Robot collecting damage information in disaster area
・Various other uses, such as moving both rough and flat land
Related Works
1,Masahiro Uda, Kenta Sawa, Kentaro Uno, Li Zheng Travis Lim, Kazuya Yoshida, “Development and Gripping Performance Evaluation of Wheel-Gripper Deformable Mechanism, ” Journal of the Japanese Society of Robotics, 2023. (Adopted)
IP Data
IP No. : JP2023-102850
Inventor : UDA Masahiro, SAWA Kenta, KATO Takuya, UNO Kentaro
keyword : robot, gripping mechanism